|
ClearCore Library
|
Loading...
Searching...
No Matches
|
ClearCore Library
|
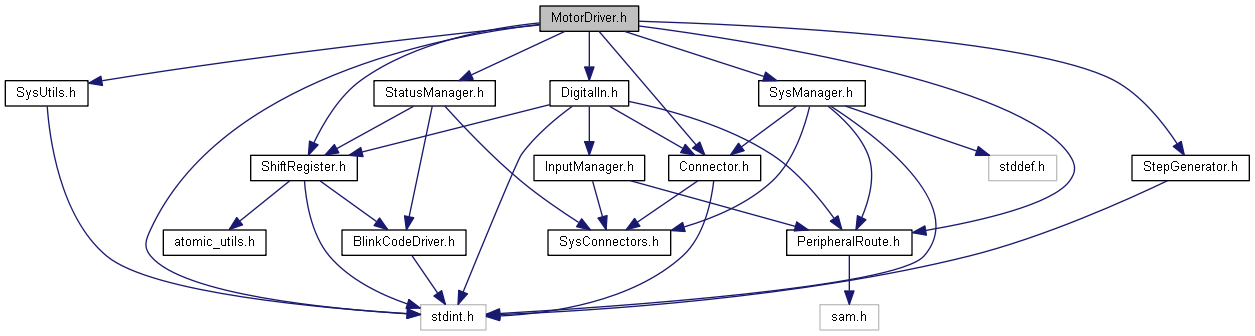
#include <stdint.h>#include "Connector.h"#include "DigitalIn.h"#include "PeripheralRoute.h"#include "ShiftRegister.h"#include "StatusManager.h"#include "StepGenerator.h"#include "SysUtils.h"#include "SysManager.h" Include dependency graph for MotorDriver.h: This graph shows which files directly or indirectly include this file:
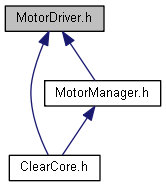
Include dependency graph for MotorDriver.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | ClearCore::MotorDriver |
| ClearCore motor connector class. More... | |
| union | ClearCore::MotorDriver::PolarityInversionsSD |
| A small register with bit and field views. This allows easy configuration for steppers that use an inverted signal on one of the main input signals. See PolarityInvertSDEnable(bool invert), PolarityInvertSDDirection(bool invert), and PolarityInvertSDHlfb(bool invert). More... | |
| union | ClearCore::MotorDriver::StatusRegMotor |
| Register access for information about the motor's operating status. Intended for use in Step and Direction mode. More... | |
| union | ClearCore::MotorDriver::AlertRegMotor |
| Accumulating register of alerts that have occurred on this motor. Intended for use in Step and Direction mode. More... | |
Namespaces | |
| namespace | ClearCore |
| Namespace to encompass the ClearCore board API. | |
Macros | |
| #define | HLFB_CARRIER_LOSS_ERROR_LIMIT (0) |
| #define | HLFB_CARRIER_LOSS_STATE_CHANGE_MS_45_HZ (25) |
| #define | HLFB_CARRIER_LOSS_STATE_CHANGE_MS_482_HZ (4) |
| #define | CPM_HLFB_CAP_HISTORY 2 |
| #define | CPM_ENABLE_DELAY 1250 |
| #define | DEFAULT_TRIGGER_PULSE_WIDTH_MS 25 |
ClearCore stepper/servo motor Connector class
| #define CPM_ENABLE_DELAY 1250 |
Delay before the motor is considered to be enabled after an enable request.
| #define CPM_HLFB_CAP_HISTORY 2 |
The amount of HLFB captures to hold onto. This should remain 2, as we only care about 1 capture back due to clipping of the last PWM to assert move done/shutdown.
| #define DEFAULT_TRIGGER_PULSE_WIDTH_MS 25 |
Default enable trigger pulse width, in milliseconds.